工业机器人与智能视觉系统应用实训系统
栏目分类:柔性制造与工业4.0 发布日期:2018-04-08 浏览次数:次
工业机器人与智能视觉系统应用实训系统,机器视觉实训装置采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分,咨询热线13122891392
联系方式见右侧悬浮框
【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】是根据客户需求而写的,非常具有代表性,在客户搜索【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】时,都能通过我们来了解相关资讯,而且【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】在客户有需求时提供参考意见。
ZRJQR-V100工业机器人与智能视觉系统应用实训系统

一、设备基本概况:
本机器视觉实训装置设备包含六自由度工业机器人、智能视觉检测系统、控制系统及一套供料、加工、装配、视觉检测、仓储机构,可以实现对高速传输的工件进行检测、分拣、搬运、组装、存储等操作。平台各组件均安装在铝型材桌面上,机械结构、电气控制回路、执行机构完全独立,采用工业标准件设计。通过此平台可以进行机械组装、电气线路设计与接线、PLC编程与调试、智能视觉流程编辑、机器人编程与调试等多方面训练,适合职业院校、技工学校自动化类相关专业《工业机器人与控制技术》、《自动化技术》等课程的实训教学,适合自动化技术人员进行工程训练及技能比赛。
二、技术参数:
1.输入电源:单相三线AC220V±10% 50Hz2.装置容量:<1.5kVA
3.实训平台尺寸:2200×1000mm×1600mm,允许偏差5%
4.安全保护:具有漏电保护,安全符合国家标准。
三、设备主要组成概况:
实训平台由六自由度工业机器人系统、智能视觉检测系统、可编程控制器(PLC)系统、供料单元、工件模拟加工单元、工件组装单元、立体仓库单元、废品回收框、各类工件、电气控制柜、型材实训桌、型材电脑桌等组成。1. 六自由度工业机器人系统
由机器人本体、机器人控制器、示教单元、输入输出信号转换器和抓取机构组成,装配夹具等,可对工件进行抓取、搬运、装配、堆垛等操作,也可以使用智能视觉相机对工件、装配过程进行实时检测操作。
机器人本体由六自由度关节组成,固定在型材实训桌上,活动范围半径大于900mm,角度不小于340°,机器人控制器具有PROFIBUS-DP或PROFINET接口能与PLC通讯接口通讯,
机器人本体具体参数如下表:
| 负载(指机器人最前端P点负载) | 6KG | |
| 运动轴数 | 6 | |
| 法兰盘(第6轴上) | D=40mm | |
| 安装位置 | 桌面 | |
| 重复精度 | +/-0.03mm | |
| 自重 | 50 KG | |
| 最大作业半径 | 730mm | |
| 保护等级 | IP54 | |
| 工作环境温度 | 5°C - 45C° | |
| 工作环境湿度 | <90% | |
| 工作噪音 | <70dB | |
| 底座安装尺寸 | 209 x 207 mm | |
| 每个轴的运动参数 | 运动范围 | 运动速度 |
| 轴1 | +/-170° | 360°/s |
| 轴2 | 45°/ -190° | 300°/s |
| 轴3 | 156°/-120° | 360°/s |
| 轴4 | +/-185° | 381°/s |
| 轴5 | +/-120° | 388°/s |
| 轴6 | +/-350° | 615°/s |
机器人示教单元有液晶显示屏、使能按钮、急停按钮、操作键盘,用于参数设置、手动示教、位置编辑、USB数据存储、程序编辑等操作。
2.智能视觉检测系统
该智能视觉检测检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/不合格、有/无等,实现自动识别功能。设备采用一套智能视觉系统,由视觉控制器、视觉相机及监视显示器等组成。视觉相机安装在型材实训桌专用相机支架上,用于检测工件的特性,如数字、颜色、形状等,对工件本身及装配效果进行实时检测操作。通过I/O电缆连接到PLC或机器人控制器,也支持串行总线和以太网总线连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
3.西门子可编程控制器单元
配备西门子S7-300可编程控制器、数字量扩展模块、模拟量模块等,用于控制机器人、电机、气缸等执行机构动作,处理各单元检测信号、数据传输等协调任务。
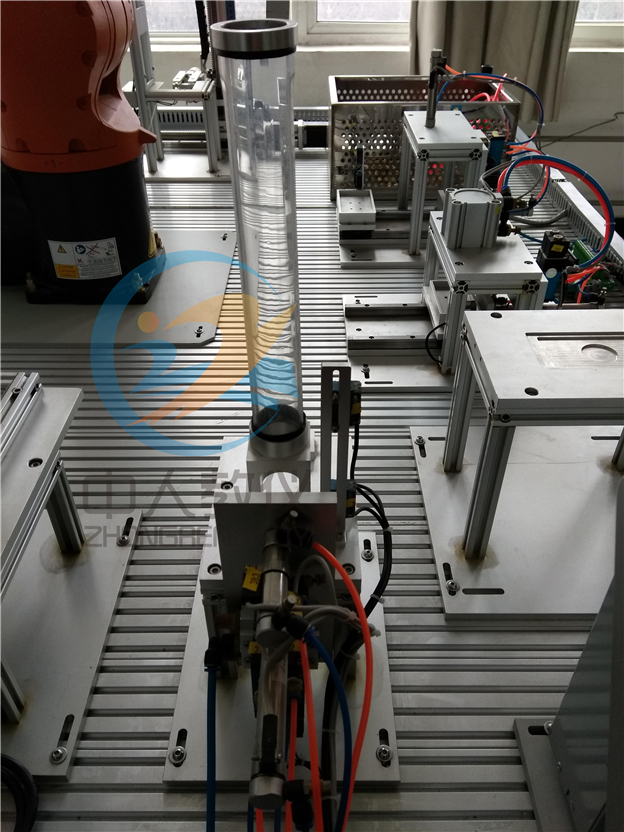
4.三工位供料单元
由井式料库、推料气缸和光电组成,安装在型材实训桌上,用于将工件库中的工件依次推出到输送线。提供不同编号、不同高度、不同颜色的标准工件,以及编号、杂色叠加等不合格工件。三工位的供料设计,使得供料方式多样化,可以进行单一的上料,也可以进行不同形状、颜色、数字的组合上料,以及对上料速度快慢控制,实现上料形式的多样化。
大物料供料单元
中物料供料单元
小物料供料单元
5.工件加工单元
由工件加工机构及工件送料机构组成,安装在型材实训桌上,用于加工中号工件。具有工件放置料盒,能对工件进行模拟冲孔操作。工件加工单元内设工件槽用于放置工件。工件加工单元设有传感器,可以检测工件的有无、方向。机器人可以进行工件位置的修正、工件按序装配、工件拆解等操作。通过对工件的正反放置,工件装配的顺序变化,提高机器人的应用灵活性,可进行机器人不同难易程度的应用考察,实现实训及考核的多样化。
7.装配单元
由工件推压机构及工件送料机构组成,安装在型材实训桌上,用于完成产品的组装工作。机器人将检测合格的大物料抓取放置到装配单元的物料盒内,然后机器人再去抓取检测合格的中型物料放置装配到大物料的凹槽内,待将中型物料装配完成后,机器人再去抓取检测合格的小型物料块,放置装配到中型物料块的凹槽内,然后安装在物料盒后面的推杆气缸缩回,将装配好的产品拖回到推压气缸的正下方,推压气缸伸出推压头将物料进行推压,以保证物料安装到位。
8.立体仓库单元
由铝质材料加工而成,配有9个仓位(3×3),安装在型材实训桌上,用于放置装配完的组件,也可以通过机器人对装配完成的组件进行拆装,并分类放置到相应的工件料库。
9.废品框

采用镜面不锈钢板材折成,焊接而成。安装在型材实训桌左后侧,用于机器人自动放置被检测出来的无用工件或不合格品。
10.电气控制柜
用于安装机器人控制器、PLC、步进驱动器及步进电机等电气部件,采用网孔板的结构,便于拆装。通过两根电缆线与型材实训桌相连,强弱电分离,连接安全可靠。
四、机器人调试编程仿真软件:
设备使用机器人专用调试编程软件,可以对机器人进行编程和调试。该软件具有文本编辑区、位置列表区、属性指示区、项目管理区等窗口,可以对机器人进行在线和离线调试。在线调试时可对机器人进行如下操作:程序编辑、伺服开和关、运行速度设置、各关节位置给定、运行和停止、单步执行指令、连续执行指令、程序跳转执行等。离线调试时可调用模拟窗口,使用三维仿真机器人模型,逼真地模拟当前选择的本型号机器人,可对机器人进行如下操作:程序编辑、伺服开和关、运行速度设置、各关节位置给定、运行和停止、单步执行指令、连续执行指令、程序跳转执行等。同时软件应提供底层驱动接口函数,可供用户进行二次开发使用及进行深层次机器人控制技术的研究。
五、通讯:
机器人控制器、视觉系统、、可编程控制器均通过工业总线网络形式连接,进行数据交换。六、设备主要配置
1.基本配置明细表| 序 号 | 名 称 | 主要部件、器件及规格 | 数量 | 备注 |
| 1 | 电气实训柜 | 700mm×600mm×1500mm | 1台 | |
| 2 | 实训平台 | 2000mm×1200mm×1400mm | 1台 | |
| 3 | 工业机器人 | 6轴工业机器人本体 | 1台 | |
| 机器人控制器 | 1套 | |||
| 4 | 智能视觉系统 | 视觉控制器 | 1台 | |
| 视觉相机 | 1台 | |||
| 5 | 智能视觉系统仿真 | 1套 | ||
| 6 | 可编程控制器系统 | PLC主机CPU314C-2PN/DP | 1只 | 西门子 |
| 7 | 步进电机控制系统 | 步进电机驱动器 | 2套 | |
| 步进电机 | ||||
| 8 | 实训模块 | 四工位供料单元、输送单元、工件组装单元、立体仓库单元等 | 1套 | |
| 9 | 型材电脑桌 | 600mm×560mm×1100mm | 1张 | |
| 10 | 气泵 | 静音气泵 | 1台 | |
| 11 | 线缆 | PLC通信电缆、以太网线等 | 1套 | |
| 12 | Ф6气管 | 3米 |
2.工具明细表
| 序 号 | 名 称 | 型号、规格 | 数量 | 备注 |
| 1 | 内六角扳手 | 1.5-10 | 1套 | |
| 2 | 十字螺丝刀 | 3×75 | 1把 | |
| 3 | 一字螺丝刀 | 3×75 | 1把 | |
| 4 | 一字螺丝刀 | 6×75 | 1把 | |
| 5 | 钟表螺丝刀 | 1套 |
注:设备视觉系统分为国产和进口两种可供选择,其他配置不变。
如对本产品/文章:工业机器人与智能视觉系统应用实训系统,机器视觉实训装置有任何疑问请随时亚星游戏官网,我们将尽力为您提供最全的实训室建设方案和最优质的服务
本文关键词:工业机器人与智能视觉系统应用实训系统,机器视觉实训装置
【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】是上海中人原创,如果您在了解产品的过程中受到启发,想要咨询相关设备的问题,我们将派专员为您解决疑问,或者您在阅读【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】中有想不通的问题,也可以咨询我们,我们将为您提供快速解决【工业机器人与智能视觉系统应用实训系统,机器视觉实训装置】问题的方案
相关热词:
上一篇:机器人拆装标定实训考核装置
下一篇:焊接机器人工作站实训系统
这些是最新的

热门关键词

热门排行
